Hi Jitse
That is an unusual noise situation, hopefully the antenna analyzer will reveal more.
As far as connector we use the Amphenol Crimp connectors. They are a more expensive but have been reliable and easier to install , Shrink tubing , vapor seal and butyl tape have also helped keep out moisture and corrosion, that we found on other installations causing noise .
Were you able to narrow the noise down to a frequency range without the antennas or dongles connected,
If the noise is coming from the board itself , It’s most likely due to failed capaicitors or filters or lack of filtering on older boards.
The newer boards use 5 Lora receive radio’s on the uhf side (on older boards FSK ) that can produce noise , although very low level , Other radio’s like bluetooth and cellular are are also on board and have antennas that can absorb noise back to the board.
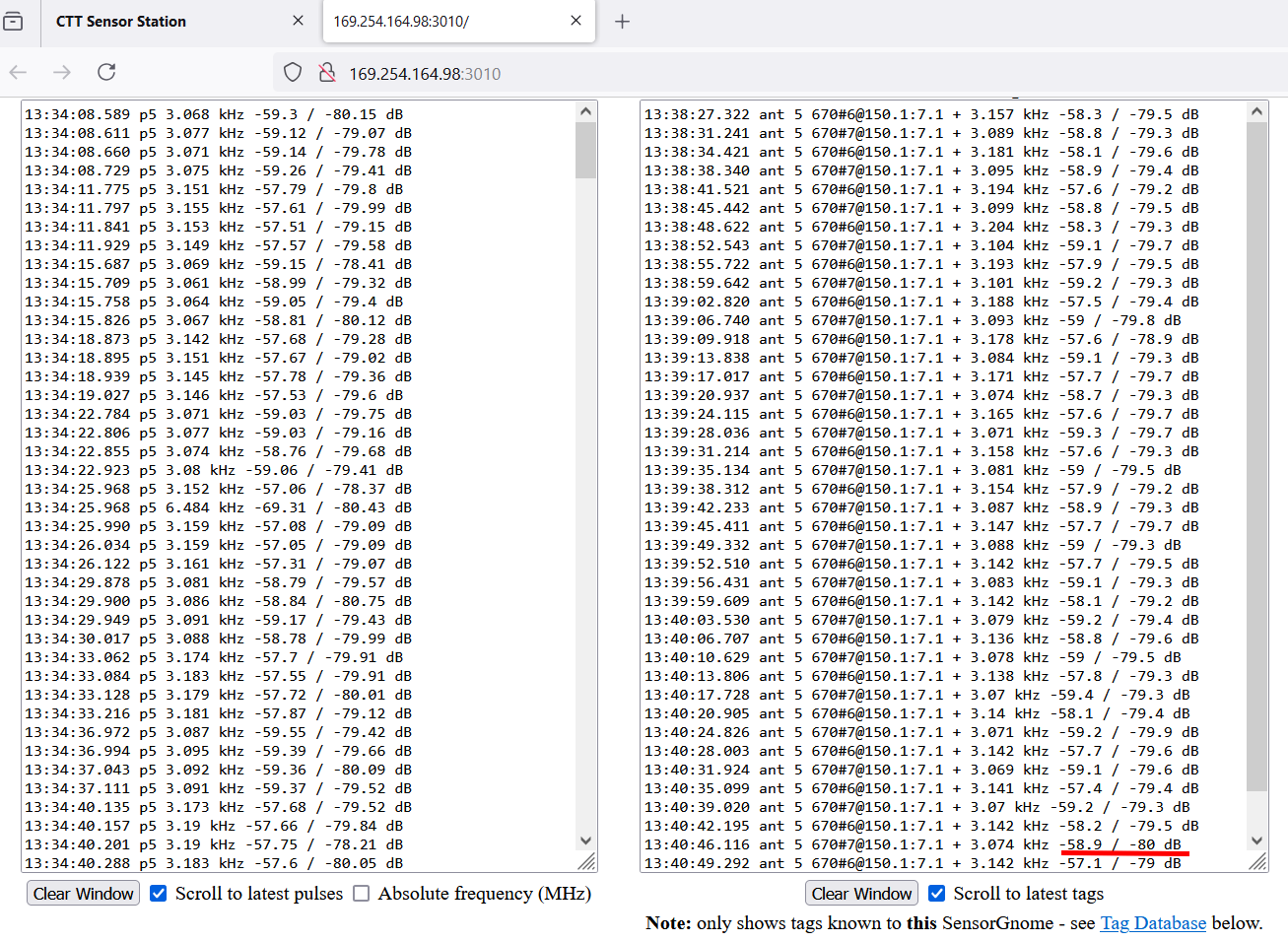
Without seeing the noise spectrum on the board and the the decibel levels it makes it makes it hard for me to troubleshoot it.
what I have found is that most of the noise I’ve seen is coming from a source outside the Motus station , Nearby electrical interference , or distant noise getting in the antenna and coax, even cell towers and satellite transmissions.
I am not sure of your location and potential noise environment,your area may even need higher shielding on the coax ( LMR 600?)
List of Satellite Frequencies by Band### VHF Band- 136 – 138 MHz: This band was used heavily by many different types of satellites in the past. Today (2023), most activity is restricted to 137-138 MHz (which is the current allocation) and consists of meteorological satellites transmitting data and low-resolution images, together with low data rate mobile satellite downlinks (eg Orbcomm)
- 144 – 146 MHz: One of the most popular bands for amateur satellite activity. Most of the links are found in the upper half of the band (145 – 146 MHz).
- 148 – 150 MHz: This tends to be used for uplinks of the satellites that downlink in the 137 – 138 MHz band.
- 149.95 – 150.05 MHz: This is used by satellites providing positioning, time and frequency services, by ionospheric research and other satellites. Before the advent of GPS it was home to large constellations of US and Russian satellites that provided positioning information (mainly to marine vessels) by use of the Doppler effect). Many satellites transmitting on this band also transmit a signal on 400 MHz.
- 240 – 270 MHz: Military satellites, communications. This band lies in the wider frequency allocation (225 – 380 MHz) assigned for military aviation.
UHF Band- 399.9 – 403 MHz: This band includes navigation, positioning, time and frequency standard, mobile communication, and meteorological satellites. Around 400 MHz is a companion band for satellites transmitting on 150 MHz.
- 432 – 438 MHz: This range includes a popular amateur satellite band as well as a few Earth resources satellites.
- 460 – 470 MHz: Meteorological and environmental satellites, including uplink frequencies for remote environmental data sensors.
There are also newer technologies out there that introduce a different range of noise issues , especially in Europe where the LoRa technology has explodes in popularity with government ,Industry and amateur radio .Even though it’s primary use is in the 800 mhz band it’s also in use in the 400 mhz and has military use in the vhf bands.
In short, If the noise source can be narrowed down to a specific frequency range and decible noise level , tuning to and away from that level can help determine the cause,
metal shielding around the sensor station could also help determine if the noise is being injected direct onto the board or coming from the antenna and coax.
Your is a very interesting and challenging situation.
Where is your station geographically located?
You have my curiosity peaked !
Good Luck in your quest!
Rick