Hello everyone.
We have a project that will involve setting up Motus stations for the detection of Nathusius’s pipistrelle bats. Due to the small mass of these bats, in terms of tags, we are limited to Lotek nanotags. In particular, the tags that I’ve been testing are the NTQB2-2-M nanotags (0.32g, 150.1MHz, burst interval 7.1 seconds).
The Motus stations we plan to install will need a detection range of at least 2km (and preferably more) to get full coverage of the area we want to monitor. I’ve been trying to optimise a testing setup to get as large a detection range as possible. I’ll go into a lot of detail here; you can skip ahead to the bold part below for a summary of the questions I have. The testing setup is as follows:
- A 5-element (Laird Y1505) or 6-element (Sirio WY 140-6N ) Yagi antenna. The Laird Y1505 is gamma matched as per the instruction manual. I’ve mostly been using one antenna at a time for measuring. The antenna is attached to a telescopic metal pole, which in turn is attached to a fire escape. This gives the antenna a height of ~9m above the ground, and ~2m above the metal railing of the fire escape.
- The nanotag is attached to the end of a metal pole, which is attached to a bicycle, putting the tag ~2.5m above the ground. The bicycle is then cycled up to the dike, where I can continue cycling on top of the dike for a few kilometres while keeping line of sight to the antenna.

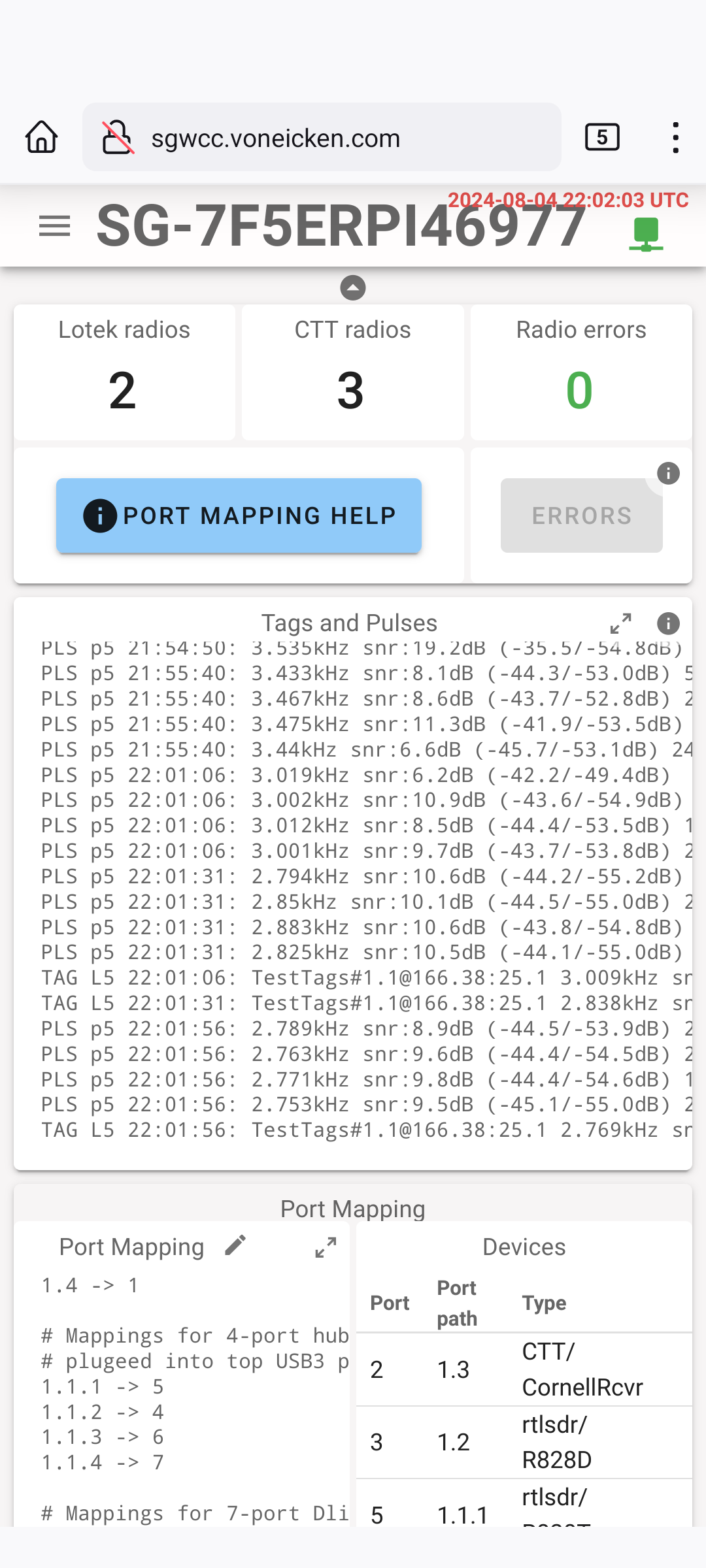
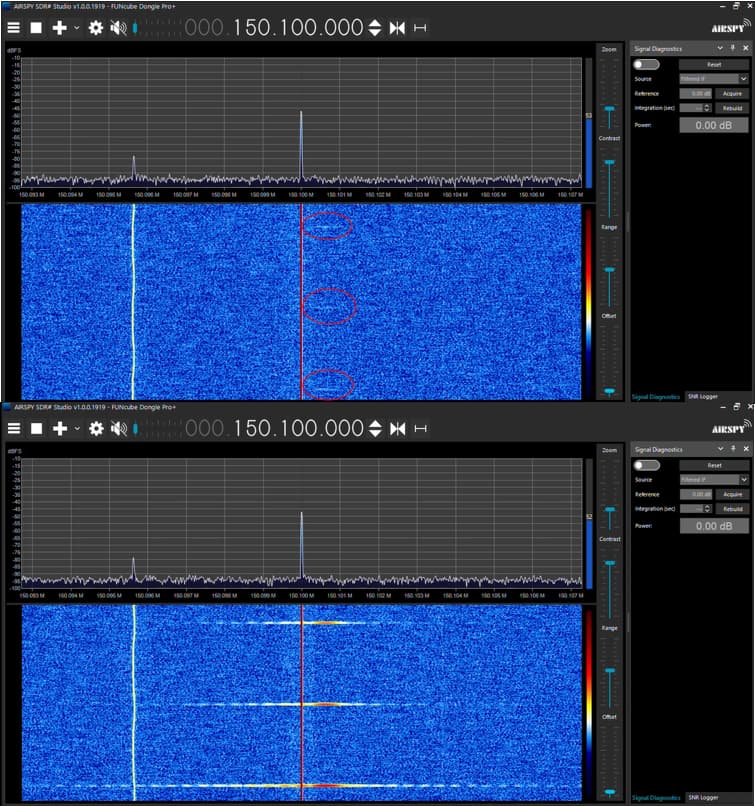
Antenna output has been analysed using a SensorGnome, a SensorStation, and a Lotek SRX1200. For the SensorGnome/Station, the SDR used was a FunCube dongle pro+. I’ve also looked at raw radio signal from the FunCube using SDRsharp.
During an initial test, the tag could be detected in the raw signal up to a distance of ~1300m, where the signal is barely above the noise level. Of course, this doesn’t mean that any software would also detect the tag, so we tested it with the SRX1200. With the antenna gain set to 71 (as high as it’d go without pelting us with a flurry of false detections) we were able to detect the tag up to a range of ~1100m. We didn’t have the SensorStation at this point, so we unfortunately couldn’t test it yet with these same conditions.
The SensorStation arrived last week, and I’ve been busy trying to at least replicate the 1100m result with it… but to no avail. Over the last few days, my testing has become extremely inconsistent, and I simply cannot figure out why. Using the same setup as before, I’ve gotten a detection range of ~700m with both the SRX1200 and the SensorStation… once. With that same setup, and the pole holding the tag attached to a sign at ~600m, two out of three times the tag was simply undetectable. I checked the raw radio signal as well, and it didn’t show up there either, so the problem must’ve been the tag itself. Other times, I could clearly still see the radio signal (quite a bit stronger than the 1300m case earlier), and the software still wouldn’t detect the tag.
I’ve been trying to tinker with the SensorStation settings in the deployment.txt file, but it seems like the important ones are completely undocumented (regarding a lot of SDR gain/filter settings).
Overall, I’ve got the following questions as a result of the tests I’ve done so far:
*** What is the maximum detection range other people have achieved with Lotek nanotags and any detection software? I’d really like to know what range I can expect under the most optimal of circumstances. Assuming line of sight between tag and receiver is always achieved, does tag/receiver height affect the detection range at all?**
*** What are the allowed values for lna_gain, rf_filter, mixer_gain, if_filter, and if_gain in deployment.txt? Is it ever necessary to change these parameters? **
*** * What value should we use for tuner_gain? The default is 40.2 - does this imply a 40.2 dB amplification? Can we use higher values in environments where we expect less radio noise? How high can the tuner gain realistically go?**